- makeITcircular 2024 content launched – Part of Maker Faire Rome 2024Posted 1 month ago
- Application For Maker Faire Rome 2024: Deadline June 20thPosted 3 months ago
- Building a 3D Digital Clock with ArduinoPosted 8 months ago
- Creating a controller for Minecraft with realistic body movements using ArduinoPosted 8 months ago
- Snowflake with ArduinoPosted 9 months ago
- Holographic Christmas TreePosted 9 months ago
- Segstick: Build Your Own Self-Balancing Vehicle in Just 2 Days with ArduinoPosted 9 months ago
- ZSWatch: An Open-Source Smartwatch Project Based on the Zephyr Operating SystemPosted 10 months ago
- What is IoT and which devices to usePosted 10 months ago
- Maker Faire Rome Unveils Thrilling “Padel Smash Future” Pavilion for Sports EnthusiastsPosted 11 months ago
An Autonomous Rover
The Autonomous Rover travels from one location in my house to another location in my house, with no help from a human. I designed it to
experiment in robot autonomy.
To perform its task, the AR (short for Autonomous Rover) integrates three major capabilities:
- Localization — determines its current location in its environment
- Navigation — determines the optimal path from its current location to a target location
- Locomotion — moves along the path from the current location to the target location
Three things…. Sounds pretty simple, but the devil is in the details. With my fully custom design, using hobby-grade mechanical and electronic components, and my limited experience in autonomous technologies, it proved difficult, but both fun and educational.
In truth, the AR is still a work in progress. However, the AR can currently localize with modest accuracy, plan a path perfectly, and move along a rather complex path with remarkable accuracy. Thus, I think that the collection of hardware and software, and lessons learned, might help others with similar goals. At the same time, the AR should make an interesting entry in the current Robots contest; please consider voting for it.
- Locomotion: Describes how a 4-wheel drive platform equipped with an IMU is used to accomplish locomotion. See steps 1-4.
- Localization: Describes how a LIDAR subsystem (a servo-mounted LIDAR sensor) is used to accomplish localization. See steps 5-12.
- Navigation: Describes how software is used to accomplish navigation. See steps 13-19.
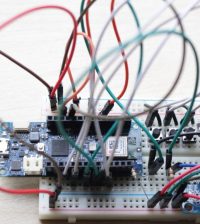
Locomotion and Localization include hardware components. For hardware, I discuss the components, criteria for selecting them, and relationships to other components. Worth noting is that the hardware components were chosen as long as three years ago. In some cases, the components I chose may no longer be the best choice, or in fact, may no longer be available. A key hardware component is a Raspberry Pi that provides the brains for the AR.

Related Posts



-
 Arduino ISP (In System Programming) and stand-alone circuits
Arduino ISP (In System Programming) and stand-alone circuitsWe use an Arduino to program other ATmega without...
- Posted 12 years ago
-

-

-
 GSM GPS shield for Arduino
GSM GPS shield for ArduinoShield for Arduino designed and based on the module...
- Posted 12 years ago
-
 Small Breakout for SIM900 GSM Module
Small Breakout for SIM900 GSM ModuleSome post ago we presented a PCB to mount...
- Posted 13 years ago
-
 makeITcircular 2024 content launched – Part of Maker Faire Rome 2024
makeITcircular 2024 content launched – Part of Maker Faire Rome 2024Applications to MakeITcircular must be in by October 3,...
- Posted 1 month ago
-
 SONY color camera module, 700 TV Lines
SONY color camera module, 700 TV LinesColor camera module equipped with a 1/3″ CCD sensor...
- Posted 2 months ago
-
 ESP32 Low Power Module
ESP32 Low Power ModuleESP32 Low Power Module, based on Espressif’s SoC capable...
- Posted 3 months ago
-

-
 Application For Maker Faire Rome 2024: Deadline June 20th
Application For Maker Faire Rome 2024: Deadline June 20thLearn More About the Ideas, Makers + Projects at...
- Posted 3 months ago